人工智能帮助无人机群穿越拥挤而陌生的空间
来源:
近期大家对人工智能无人机群实战非常感兴趣,小编收集了一些关于人工智能无人机群的信息和照片,下面鞍山信息港为大家讲解下人工智能帮助无人机群穿越拥挤而陌生的空间。
人工智能帮助无人机群穿越拥挤而陌生的空间
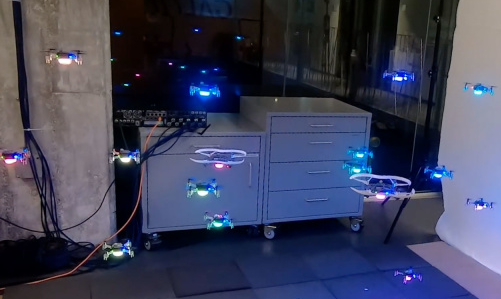
无人机群经常飞到外面是有原因的:机器人飞行器很难在狭窄的空间中航行而不撞到对方。但是,加州理工学院的研究人员可能有办法让这些无人机在室内飞行。他们开发了一种机器学习算法,即全局到局部安全自主综合(GLAS),该算法可让群体在拥挤的未映射环境中导航。该系统通过为每架无人机赋予一定程度的独立性来工作,使其适应不断变化的环境。
GLAS让每台机器学习如何独立导航给定空间,即使它与其他坐标相协调,也不必依赖现有的地图或群中其他所有无人机的路线。由于计算分散在许多机器人上,因此这种分散的模型既可以帮助无人机即兴创作,又可以使扩展集群更加容易。
附加的跟踪控制器Neural-Swarm可帮助无人机补偿空气动力学的相互作用,例如机器人从头顶飞过的向下冲洗。它已经比不考虑空气动力学的“商业”控制器更加可靠,跟踪误差小得多。
当然,这可能对无人机灯光表演很有用,但也可以帮助进行更重要的操作。搜寻和救援无人机可以安全地对区域进行梳理,而自动驾驶汽车可以将交通拥堵和碰撞降至最低。实验室外的实现可能需要一段时间,但是如果成群的无人机变得相对司空见惯,请不要感到惊讶。
以上是小编为大家讲解的人工智能帮助无人机群穿越拥挤而陌生的空间,关注鞍山信息港看更多人工智能无人机的信息。
郑重声明:本文版权归原作者所有,转载文章仅为传播更多信息之目的,如有侵权行为,请第一时间联系我们修改或删除,多谢。